张福生:交通感知与交通信号设计
编者按:“交通检测技术的发展一直伴随着并推动着智能交通技术的发展。一提到交通检测,始终面临着这样几个问题,比如用什么样的检测方法?检测器到底应该安装在哪?检测范围有多大?要获得什么样的交通数据?这些数据应该怎样使用?只有回答好这些问题,才能从应用设计、产品选择、工程实施、运行维护、控制优化和控制、效益评价等多个维度做好交通控制工作。这绝对不是简单的智能和智慧就可以概括的。”
北方工业大学城市道路交通智能控制技术北京市重点实验室研究员张福生在赛文交通网主办的“交通感知新阶段”在线研讨会上,概要介绍了交通感知和信号设计的需求目标,并结合实际应用场景,分析不同的交通感知手段在交通信号控制中的应用细节,最后就当前热门的交通感知和数据融合的话题,提出了独到的见解和思考。
正文
谈论到交通感知,就不得不提到一个人物,查尔斯·阿德勒。他生于1899年,是一名铁路信号工程师,从可考的历史上看,应该算得上是交通检测的创始人之一。1925年12月,阿德勒在巴尔地摩北部的一条道路上测试了他的发明——当车辆通过限速点时,路面的电磁装置会自动激活车载限速装置,将车辆速度限制到24km/h。这应该算是最早的车路协同,比现在的车路协同早了将近100年。
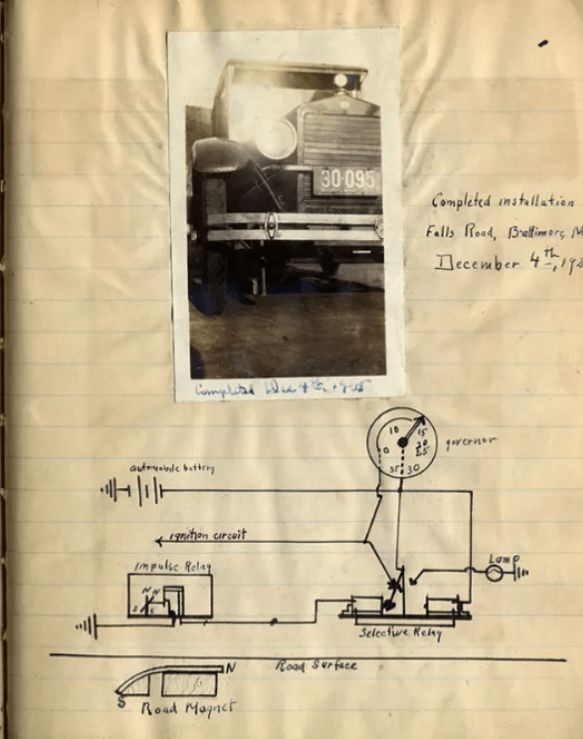
图1 珍藏于美国国家历史博物馆的阿德勒发明的自动限速装置图纸
1928年,阿德勒在巴尔的摩安装了世界上最早的车辆检测装置,通过检测汽车的鸣笛声感知车辆的交通需求,这是被公认的历史上第一个感应式控制路口。1929年,阿德勒在巴尔的摩的街道上安装了最早的行人过街按钮装置,世界上第一个感应式行人过街装置也就此诞生。几乎与此同时,另外一位发明家哈里·A·哈夫,发明了最早的地面式交通检测器,利用嵌入路面的两块金属板感知车辆压力,实现车辆检测,这种检测技术一直延续使用了将近30年。
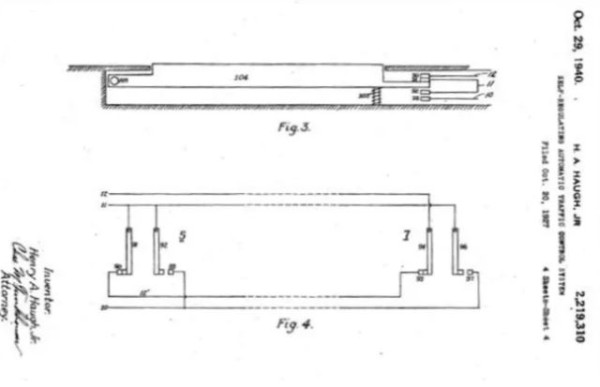
图2 Harry A. Haugh发明的交通检测器原理图
可以说,交通检测技术的发展一直伴随着并推动着智能交通技术的发展。
纵观交通检测的历史,包括声学检测、光学检测、磁场检测、能量反射检测以及电磁感应检测、振动压力检测等各种检测方法都被引入到了交通检测。
提到交通检测,我们始终面临着这样几个问题,比如用什么样的检测方法?检测器到底应该安装在哪?检测范围有多大?要获得什么样的交通数据?这些数据应该怎样使用?回答好这些问题,是每一位从事交通信号控制和交通管理从业人员所要具备的基本素质,也是产品厂商、集成商、交通管理机构要回答的问题。
只有回答好这些问题,才能从应用设计、产品选择、工程实施、运行维护、控制优化和控制、效益评价等多个维度做好交通控制工作。
这绝对不是简单的智能和智慧可以概括的,其中包含着大量的技术细节、工程细节、需求细节。
交通检测从设计层面上可以分为5个方面,分别是:检测器的设置,检测数据、检测方式、数据的应用以及控制场景,如下图所示。

图3 交通检测器设计所需要关注的重点
首先,从检测器设置的角度来分析,这张图来源自于著名的交通信号配时手册STM,形象地表明了一个信号控制路口需要安装的设备情况,包括信号输出的灯具、信号控制机、空中和地面的车辆检测装置,以及行人交通检测等等。
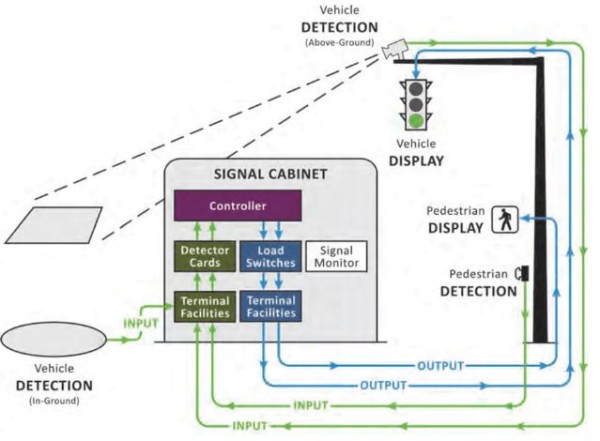
图4 STM交通信号配时手册中的路口控制场景
第二个方面是检测数据的使用。通常会有一种朴素直观而简单的认识,那就是通过一段时间的交通数据统计,可以分析出交通流的运行规律,根据规律划分不同的控制时段,并生成不同时段的信号控制周期;再通过各个流向的流量数据分析,设计信号控制配置方案的绿信比,结合不同路口之间的空间关系和运行速度等,设计绿波带的相位差等控制参数;最后将生成的控制方案下发到信号控制机,通过信号控制机运行配置方案,对控制效果进行评价,并不断迭代优化控制方案。
实际上,交通检测的目的远不止于此。我们之所以需要交通检测,不仅仅是为了做一个计数器,不仅仅需要一些统计数据,还希望检测器成为交通控制系统的眼睛,可以看到实时的交通需求、感知到交通流运行规律、及时发现交通事件、利用检测保障交通安全。
交通检测要实现的目标,我的总结是应该包括以下9个方面:
(1)通过检测交通的需求,形成路权的请求。
(2)通过检测连续的交通流,形成路权的扩展。
(3)通过分析车队的间隙和车辆的通过特性,适时的中止低效交通流路权。
(4)为交通优化模型进行参数标定,实现实时控制优化。
(5)检测特殊交通需求,比如公交、货运、急救、自行车、行人等。
(6)统计交通数据,分析并优化定周期配置方案。
(7)识别并发现特殊交通事件,进而驱动控制响应。
(8)检测车辆的到达时机,规避安全困境,保障交通安全。
(9)评价交通控制效率,评价路网服务水平。
要想实现这些目标,就要对不同的对象和需求做出有针对性的检测,例如高速车流,转向车流、自行车、行人、紧急车辆、公交车辆等,概况如下图所示。
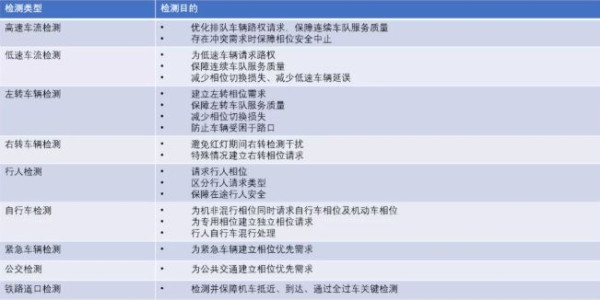
图5 对不同类型检测目标的检测目的
第三个方面是检测方式。目前,比较常见的主要包括线圈检测、视频检测、雷达检测、超声波检测、地磁检测、红外检测、激光检测等检测手段,随着车路协同技术的发展,基于高精度车辆定位与实时数据通信的车路协同技术也为交通检测提供了更加丰富的数据。由于不同检测方式的检测原理、安装施工工艺不同,也存在各自的优缺点。
线圈检测是利用车辆在通过传感线圈时对电感的扰动实现车辆检测。作为目前最成熟的检测方式,它可以实现对流量、占有率、速度、车头时距等交通数据的感知,且抗气象干扰能力强,定点检测精度高,但是有一个很明显的缺点,就是在安装时需要路面切割施工,对路面破坏大,后期维护比较困难。
地磁检测是利用车辆通过时对地球磁场的扰动来实现交通检测,它采用无线数据传输的方式,与线圈检测相比,施工较为简单,但同样也无法避免对路面的破坏。
微波雷达检测,利用无线电波照射与反射的多普勒效应进行检测,可以利用软件灵活定义检测区域,实现对广域多目标的精准测量。目前新型的雷达检测能够精准的识别每辆车的位置,运行轨迹、运行速度、车型等信息,甚至可以检测到路侧的行人等目标。
激光雷达检测基于多线束激光扫描测距,通过构建空间点云的方式,实现对交通目标的检测。超声波检测是利用声波反射的原理,通过测距的方式实现检测。
近年来发展最快的检测手段就是视频检测,通过视频数据跟图像识别技术实现目标检测,相比其他方式可以识别更丰富的信息,例如行人、机动车、非机动车等多目标的颜色、车牌、形状、速度以及运行轨迹等。
利用视频的广域检测特性,也可以设置基于软件定义的检测区域,结合互联网数据,可以完成连续的车辆跟踪,对目标的速度和位置进行判别,实现对路网服务水平和路口控制效益的分析和评价。
各种各样的交通检测手段,无论线圈电感变化、视频图像,雷达回波,磁场扰动,都是为了实现存在的检测,目标存在检测是一切感知的基础,通过存在检测,可以进行车辆位置的计算,身份属性的识别,流量的统计、速度的计算、占有率的分析,车头时距的计算,再对采集数据进行整合分析,进而可以认知道路服务水平,分析交通事件,分析延误,分析道路的通行能力,并在这些数据的基础上生成交通控制策略,例如协调子区的划分,配置方案的生成,区域的优化与交通安全相关的设计。
存在检测对检测区域有严格的要求,检测区域的设定差异会对检测结果产生巨大的影响。以下图为例,车辆进入、保持、离开一个检测区域时会形成存在信号,分别用黄色的检测区域和蓝色的检测区域进行对比,放大检测区域,就会放大占有率,检测区域大于车间距离时,还会影响流量检测准确性,由此统计出的结果也会发生相应的变化。同样,检测区域不变,在相同的交通量情况下,车队分布特征不同,所反映的交通流特点也不同,在控制策略上就需要区别考虑。
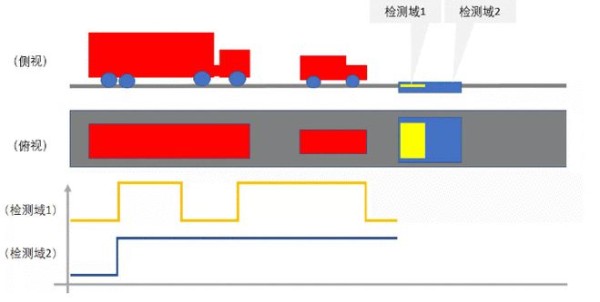
图6 相同车流通过不同检测区域的检测结果差异
仅仅依靠流量统计,无法真实地反映这些特征,这就是为什么要研究和对比不同检测器的差异和使用场景的原因,也是为什么要研究实时交通检测的原因。通过对相同检测区域中不同检测方式的脉冲分析,各方式表现出了差异明显的检测结果,如下图所示。
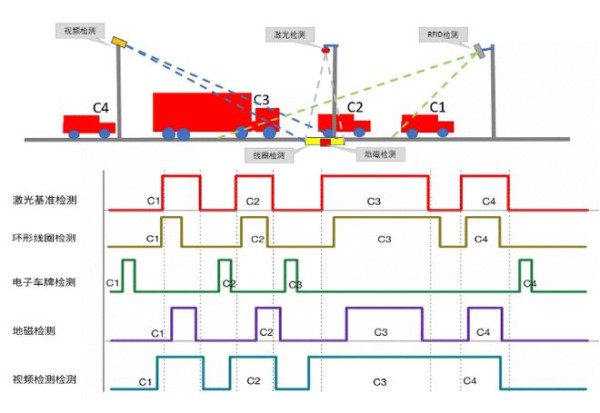
图7 各检测方式对相同车流的检测结果差异
利用交通检测数据,不仅可以用来优化交通信号控制,还可以对交通信号控制进行效果评价,比如利用高精度的连续轨迹数据,对绿波控制的效果进行评价;利用断面检测数据,对车辆到达路口的时机进行评价;利用相应的评价模型,分析相位差优化的效益;分析绿灯期间车辆通过停止线的车头时距,判断绿灯期间通过流率的变化,可以得知绿灯期间车辆的启动延误,排队情况、车队离散到达与通过等特性,进而综合分析绿灯的使用效率。
在感应控制模式中也可以利用这些数据精巧设计相位的开始、扩展、中止,进而提升控制效率。在某些实时控制系统的模型当中,也同样对交通检测数据的精度提出了要求。比如著名的SCOOT控制系统中,需要根据上游车辆的精准检测,预测车辆的到达延误,实现延误最小为目标的实时优化。
在SCATS系统中,车头时距是关键检测数据,用于计算绿灯期间的类饱和度,实现方案选择。检测器的位置,检测域的宽度都会对控制产生巨大的影响,如果检测域发生变化,车辆时距就会严重失真,干扰饱和度的计算,进而影响方案选择的结果。
对于公交优先控制方面,常用的信号延长、早入、相位重入等方法的选择,都依赖精准的公交检出时机,检出位置决定了公交车抵达路口的时间,进而决定了采用什么样的优先策略。
对于行人检测方面,不仅要检测行人希望通过路口的交通需求,还可以通过按钮时间长短、刷卡检测、视频检测、雷达检测等手段,实现分类检测、在途检测,为行人交通提供更安全舒适的交通信号服务。
有些交通信号控制关键参数的设置,也与交通检测紧密相关,比如最小绿灯时间、感应控制通过时间以及清空时间等参数的设计,都可以通过实际交通检测的数据进行优化。在设计检测器位置、区域的时候,主要考虑的因素包括:控制目标、路口物理特征以及检测对象等等。其中,首要因素就是检测器的检测区域以及位置到达停止线的行程时间。
以感应控制为例,我们的研究重点在于感应控制的需求如何产生,相位如何启动,如何扩展,如何结束。依据检测数据生成相位需求和相位延伸,对检测区域到达停止线的行程时间进行计算并设置相关参数,例如设定相位的请求机制、扩展时间以及控制相位的中止时机等等。
除了实时的交通检测数据之外,通过检测时间的设定,还可以感知交通需求的特征,例如通过感知检测器上车辆存在的时间长短,大致可以猜出车辆的预期行驶方向,进而实施不同的交通控制动作。
以环岛控制为例,通过环岛内部设置检测器,根据占有时间分析环岛死锁交通事件,进而实施环岛控制策略;在溢出控制中通过设计不同的检测位置,实现溢出预警、溢出发现、溢出解除等交通事件,联动不同的控制策略,缓解溢出现象;在匝道控制场景当中,通过在主路和匝道设置检测器,实现匝道入口控制以及与地面平交路口的协同联动,依据主路服务水平与匝道交通需求的条件组合,实施不同的流率调节控制策略。
在交通安全方面,以交通信号控制中的黄灯陷阱问题为例。这里借用李克平老师的一页PPT,在设定的车流速度下,合理的黄灯时间可以保障车辆安全通过路口或安全停车于停止线之前。但是当车速超过设计速度时,会产生一段困境区域。困境区域中的车辆会陷入过不去又停不下的尴尬。另外,由于驾驶人的习惯不同,面对黄灯时也会产生两难决策困境区域,这就带来了交通安全问题。通过合理设定检测器位置,可以保证决策困境区域的有效清空,进而解决由于黄灯困境带来的交通安全问题。
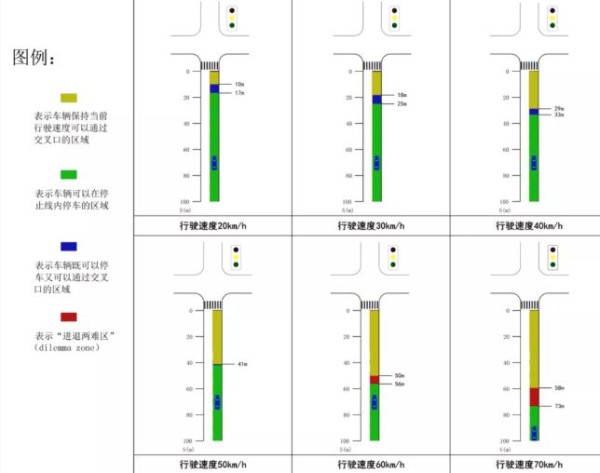
图8 黄灯困境
在以上的几个应用场景中,与采用哪种检测技术无关,关键是要有明确的应用目标、科学的检测设计、准确的检测数据输出。简单的通过统计数据的误差百分比并不能评价交通检测的数据质量,而是应该建立与控制场景相关的综合评价体系。
也就是说,仅有流量、占有率和车头时距等统计数据不能完全满足控制需求,统计数据的精度也不足以全面评价交通检测的适用性和检测精度。要基于控制场景的需求,去选择合适的交通检测设备;检测方式、产品性能和工程设计的结合,会共同影响应用的效果;存在检测、通过检测、检测时空特性也会影响控制的效果。
最后,呼应讨论的核心话题:交通感知新阶段。
感知融合作为目前的热门话题,个人认为感知融合要包括两个层面:第一层是检测互补,像检测区域的互补和检测目标类型的互补,例如某些检测器可以检测机动车道,某些可以检测行人的等待区域;某些检测器能够检测到机动车,另一些能够检测到非机动车、行人;某些检测器可以检测到特殊的交通需求,比如急救车辆、消防车辆、公交车辆等等,这样的互补数据只需要简单叠加就可以实现初步的数据融合目标。
另外一层融合是特征的融合,利用不同检测器的不同检测能力,对同一目标进行不同属性的识别,比如利用视频检测车牌、车辆的颜色、厂牌型号等信息,利用雷达检测车辆的位置、速度等等,再进行数据融合。要实现这种数据融合,就需要做到时空的严格一致性,也就是在同一时间、同一位置检测到同一目标,如果没有严格的时空一致性的基础,融合只是一种美好的愿望。在具体实现上设计精确的空间定位于高精度的时钟同步,在现有技术条件下还有一定的难度。
关于近期非常热门的话题,智慧路口和全息感知,我一直存在着各种各样的疑问,感知融合了就是全息感知吗?感知融合就是智慧感知吗?智慧感知就是智慧路口吗?智慧感知能够提升或提供交通控制需要的实时、精准的交通数据吗?感知终究是要服务于控制、管理、评价的数据需求,任何检测手段不管多智能,首先要完成的是传统交通检测所必须完成的基本动作,即检测的实时性和准确性,离开了这些最基本的需求,智慧、智能也就失去了意义。衡量的标准可以用三个问题:准确性、实时性与传统检测器对比如何?稳定性、可靠性与传统检测器对比如何?生命周期与投资与传统检测器对比如何?
以上就是我要分享给大家的全部内容,谢谢大家。
作者 | 张福生,北方工业大学城市道路交通智能控制技术北京市重点实验室研究员,信控中国俱乐部会员
网址:张福生:交通感知与交通信号设计 https://mxgxt.com/news/view/563866
相关内容
陕西交控集团副总经理马小伟到陕西省交通规划设计院调研学会与父母沟通教学设计(通用10篇)
与中国轨道交通共同成长
怎样与老公沟通交流说话技巧
北碚区交通局地址
梁湖镇打好综合交通建设大会战
北京交通大学
交警答疑|济南路口信号灯有几种?驾驶人该如何正确通行?
交通部:推动交通新基建,开展时速600公里级高速磁悬浮研制和试验
富杜氏血友病卡通设计持有图片
随便看看
最新实时动态
- 茅威涛的“突围” 越剧向何处去
- 记者:胖东来的饭真挺好吃,于东来:饭如果不好吃厨师就完蛋了. !
- 刘宇宁谈如何消解内耗
- 现实中谁又不想要一个果郡王这样的对象!
- “你内心的虚伪 导致无辜的女孩离去” 勇敢的心
- 繁星追爱,男友比自己小十岁,成功从情敌手里抢过来
- 绅士礼,好优雅的pretty! 20260718 黄子韬演唱会嘉宾 @王鹤棣_Dylan ·······
- 张艺兴 张彬彬 吴磊 宋威龙 白敬亭 张新成 你最吃谁的颜值~微博VC计划
- 节目里出现尴尬一幕
- 王俊凯重庆演唱会哭了,再多待一秒就要哭出来
热点实时动态
- 133726
- 25469
- 20067
- 19756
- 19503
- 19461
- 19193
- 18766
- 18743
- 18716

