变势场APF
0 引言
自动驾驶汽车技术旨在降低交通事故率、提高驾驶的安全性和舒适性[1-2]。结合规划层的模型预测控制系统是自动驾驶汽车主动安全技术中的关键环节。当自动驾驶汽车在行驶过程中遇到障碍物时,规划层控制器需要根据障碍物的大小、位置和速度等信息进行轨迹重规划,以确保车辆在动力学和运动学约束条件下能够有效避让障碍物。在轨迹重规划过程中,应对控制周期的速度增量和前轮转角增量进行约束,以保证车辆在跟踪过程中的平稳性[3]。
模型预测控制算法与人工势场方法在自动驾驶和机器人领域得到了广泛应用;这两种技术各自发挥着重要作用,推动了智能交通和自动化系统的发展。
文献[4]针对无人驾驶履带车辆在对参考轨迹跟踪的过程中所面临的外部干扰以及系统不确定性问题,先是设计了一种MPC控制器,同时引入反馈机制,用来提高系统稳定性和外部干扰下的鲁棒性。文献[5]为了提高无人驾驶车辆的跟踪精度以及实时性,设计出一种基于状态扩展的双反向MPC控制器,该模型显著提高了车辆的轨迹跟踪性能。文献[6]针对无人驾驶汽车的轨迹规划和跟踪控制的问题,设计了一种NMPC分层控制器。该控制器能够以结构化道路的代价函数为基础,并使用SOA算法在线调整参数,具有更好的轨迹跟踪效果以及稳定性。文献[7]为了提升模型预测控制(MPC)控制器的性能,在车辆模型的目标函数中引入了指数衰减权重矩阵。此外,为了增强MPC控制器的实时性,采用Laguerre函数对计算过程进行了优化。文献[8]为了解决由于假设预测区间内纵向速度恒定而导致的路径跟踪精度问题,设计了一种引入纵向速度补偿的MPC控制器,有效地提高了车辆的跟踪精度。文献[9]为了解决经典的模型预测控制器对变化工况适应性差的问题,采用模糊控制对经典模型预测控制算法的权重进行自适应调整,提升了控制器的鲁棒性。
文献[10]针对高速公路上车辆碰撞导致的安全问题,构建了车辆人工势场和安全行驶约束的道路势场,设计一种面向动态障碍物的路径规划控制器,实现了车辆自主避障。文献[11]针对传统人工势场算法无法保证车辆与道路边界及障碍物保持足够的安全裕度问题,使用类椭圆斥力场替代传统的斥力势场,并添加了道路边界的斥力势场,以确保车辆在道路内部的稳定行驶。文献[12]通过人工势场理论提出了碰撞风险区域和转向失调风险区域,并且对车辆受到的斥力和引力进行改进,提升无人车驾驶的安全性和舒适性。文献[13]为提升自动驾驶汽车轨迹跟踪控制的实时性能,引入人工势场法作为轨迹规划与跟踪的优化目标函数,设计了一种高效滚动时域轨迹规划的MPC控制器。文献[14]为了解决人工势场中引力场远距离引力大,无法处理复杂交通环境问题,提出自动驾驶汽车“行车意图-风险复合场”模型,旨在识别和评估环境中的潜在风险,提高了无人车在复杂交通环境中自主避障能力。文献[15]为了解决自动驾驶汽车弯道超车安全性问题,建立了道路曲率的弯道APF函数引导车辆实现弯道超车,显著的提高了无人车在弯道超车时的安全性。
文献[16]为了解决变曲率车道车辆突入变道行为引发的安全问题,将紧急协同避撞控制模型(CAPF)和模型预测控制(MPC)进行融合,设计了自适应模型预测控制器(CAPF-MPC),有效解决了车辆突入变道的安全性问题。文献[17]基于人工势场算法研究了APF在复杂环境中的应用,依据复杂环境中不同障碍物设计出相应的势场模型,并与模型预测控制算法相结合,实现对不同类型障碍物的有效避让。
综上所述,人工势场法、模型预测控制在复杂工况下能够有效避免与障碍物发生碰撞,但是规划出的路径不平滑,车辆的稳定性和安全性较差。针对此问题,提出了势场平滑指数优化了传统的人工势场算法并与模型预测控制相结合,设计了可对障碍物分类避障的APF-MPC控制器,并通过CarSim/Simulink联合仿真验证所设计控制器的合理性与有效性。
1 车辆动力学模型
当自动驾驶汽车在低摩擦系数的路面上行驶时,轮胎的滑移现象对轮胎的纵向力产生显著影响,从而影响自动驾驶汽车的操控稳定性和安全性。基于小角度假设和线性轮胎模型,选用了考虑轮胎滑移的车辆动力学非线性模型,以更准确地描述车辆在复杂路况下的动态行为。其模型如图1所示。
根据力矩平衡和受力平衡得到车辆动力学非线性数学模型表达式如下[3]:
m x ¨ = m y ˙ φ ˙ + 2 C l f s f - C c f δ f - y ˙ + a φ ˙ x ˙ δ f + C l r s r m y ¨ = - m x ˙ φ ˙ + 2 C c f δ f - y ˙ + a φ ˙ x ˙ + C c r b φ ˙ - y ˙ x ˙ m y ¨ = - m x ˙ φ ˙ + 2 C c f δ f - y ˙ + a φ ˙ x ˙ + C c r b φ ˙ - y ˙ x ˙ X ˙ = x ˙ c o s φ - y ˙ s i n φ Y ˙ = x ˙ s i n φ - y ˙ c o s φ
(1)
式中, m为车体质量; φ为车辆横摆角; φ ˙为横摆角速度; I z为车辆绕 Z轴的转动惯量; X ˙和 Y ˙为全局坐标系下车辆在 X轴和 Y轴的速度; x ¨和 y ¨为车辆坐标系下车辆在 x轴和 y轴的加速度; C c f和 C c r分别为车辆前、后轮胎的侧偏刚度, C l f和 C l r分别为车辆前、后轮胎的纵向刚度; S f和 S r分别为前、后轮滑移率。
2 综合人工势场模型
人工势场算法中障碍物斥力大小取决于与障碍物的距离,距离障碍物越近,车辆所受势场斥越大;距离障碍物越远,所受势场斥力越小。经典的人工势场斥力模型如
式(2)所示[10]。
U = 1 2 k 1 ρ ( p , q ) - 1 ρ 0 2 0 ≤ ρ ( p , q ) ≤ ρ 0 0 ρ ( p , q ) ≥ ρ 0
(2)
式中 k表示比例系数, p和 q代表车辆和障碍物的坐标, ρ ( p , q )表示矢量,方向为障碍物指向汽车,大小为车辆与障碍物的欧氏距离; ρ 0是一个常数,表示障碍物对车辆影响的范围。
从
式(6)可以看出,经典的人工势场法在路径规划过程中未考虑车辆的动力学模型、车辆速度以及势场变化对规划路径的影响。为此,引入了势场平滑指数的概念,以衡量道路边界与不可穿越障碍物之间的势场变化情况。针对道路边界、可穿越障碍物和不可穿越障碍物三种类型的障碍物,设计了三种不同的斥力模型,以优化路径规划的效果。
2.1 道路边界势场模型
构建道路边界势场模型应满足以下条件:道路中间的势场能量应较低,而道路边界的势场能量应较高,并且随着靠近道路边界,势场能量逐渐增加,以确保车辆不驶出道路边界。此外,在进行避障时,车辆的速度越快,潜在的危险系数越高,因此在建立势场模型时需引入车辆速度的因素。道路边界势场模型设计为
式(3)[11]。
U R = 1 2 η ' v x 2 + v y 2 1 ρ ( Y l , Y r ) - 1 s 0 α 0 ≤ ρ ( Y l , Y r ) ≤ s 0 0 ρ ( Y l , Y r ) ≥ s 0
(3)
式中: η '表示道路边界线斥力系数; v x表示车辆纵向速度; v y表示车辆横向速度; ρ ( Y l , Y r )表示车辆位置与道路边界的距离; s 0表示距离道路边界的安全距离; α表示势场平滑指数。随着势场平滑指数 α的增加势场能量值将降低,势场能量值随势场平滑指数变化趋势如图2所示,道路边界斥力势场模型曲率变化示意如图3所示。
2.2 可穿越障碍物势场模型
在车辆行驶过程中,若遇到小型凹坑、小型凸状障碍物或减速带等障碍物,这些障碍物通常不会对车辆造成严重危害。因此,这类障碍物的特性被定义为可穿越的。可穿越障碍物势场模型其表达式如
式(4)所示[17]。
U c = 1 2 β v x 2 + v y 2 1 e ρ c ( p , q ) - 1 e p c 0 ≤ ρ c ( p , q ) ≤ ρ c 0 ρ c ( p , q ) ≥ ρ c
(4)
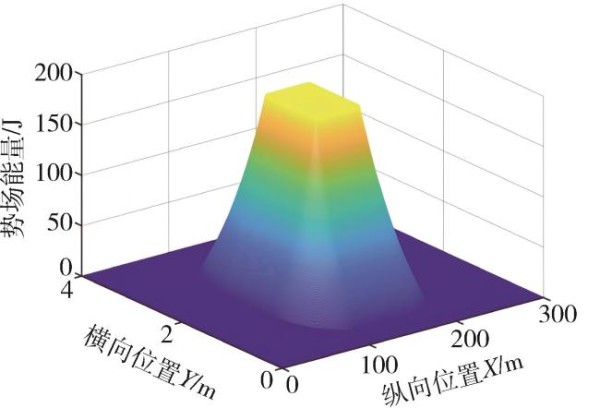
式中 β表示可穿越障碍物势场系数; c表示与可穿越障碍物的距离。可穿越障碍物势场如图4所示。
Full size|PPT slide
2.3 不可穿越障碍物势场
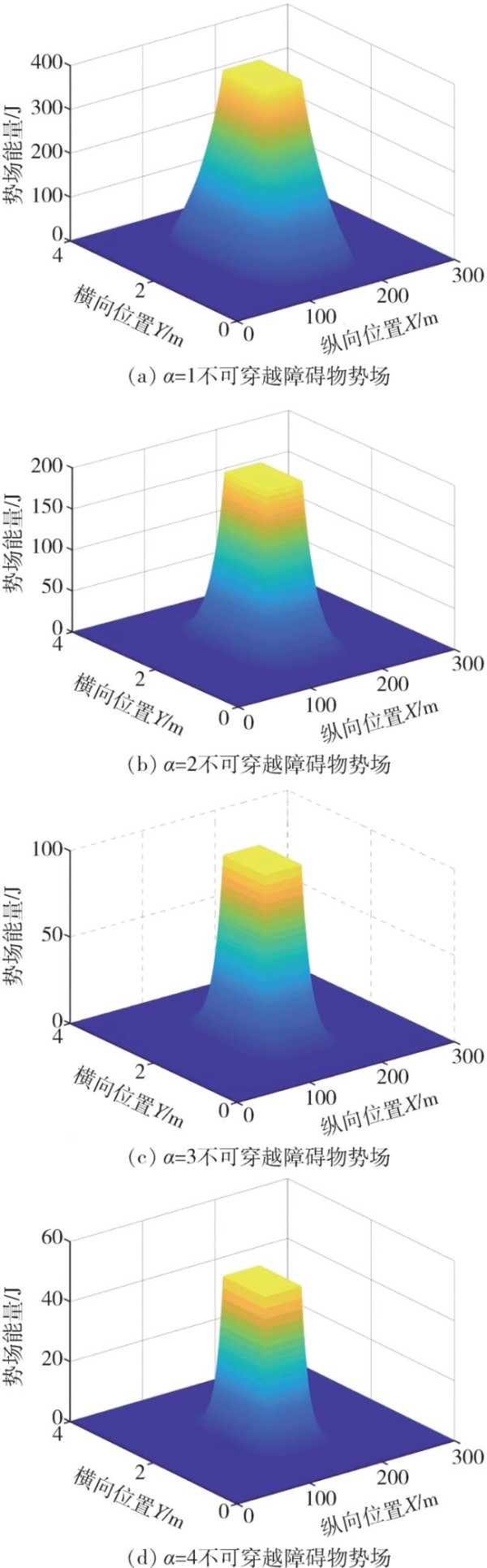
不可穿越障碍物应满足以下条件:在障碍物区域内产生的势场值达到最大,且随着靠近障碍物,势场能量逐渐增加。因此,车辆在行驶过程中遇到不可穿越障碍物时,应完全避开该区域。不可穿越障碍物模型可采用
式(5)表示[17]。
U N C = 1 2 ε v x 2 + v y 2 1 ρ n c ( p , q ) - 1 ρ n c α 0 ≤ ρ n c ( p , q ) ≤ ρ n c 0 ρ n c ( p , q ) ≥ ρ n c
(5)
式中: ε ε表示不可穿越障碍物势场系数, ρ n c ( p , q )表示车辆位置与不可穿越障碍物的距离, ρ n c表示安全因子,不可穿越障碍物势场如图5所示。
Full size|PPT slide
2.4 综合势场模型
车辆在结构化道路上行驶时将受到综合势力场的影响,综合势场表现为道路边界势场、可穿越障碍物势场、不可穿越障碍物势场三者之和,其表达式如
式(6)所示[18]。
U r e p = ∑ U N C + ∑ U C + ∑ U R
(6)
式中: U N C表示不可穿越障碍物势场; U C表示可穿越障碍物势场; U R表示道路边界势场。
3 <bold>APF-MPC</bold>控制器设计
3.1 预测模型
选取为车辆的横向、纵向速度、横摆角、横摆角速度、横向、纵向位置作为状态量,即: ξ = ( y ˙ , x ˙ , φ , φ ˙ , Y , X ) T,前轮转角 u = δ f作为控制量, τ = φ , Y T η = φ , Y T作为输出量。结合
式(1)并将之转换成状态空间表达式形式并采用泰勒公式线性化处理可得
式(7):
ξ ˙ = A ξ + B u η = C * ξ
(7)
式中:
A = 2 δ f C c f ( y ˙ + a φ ˙ ) m x ¨ 2 φ ˙ - 2 δ f C c f m x ˙ 0 y ˙ - 2 a δ f C c f m x ˙ 0 0 - φ ˙ + 2 C c f ( y ˙ + a φ ˙ ) + C c r ( y ˙ - b φ ˙ ) m x ˙ 2 - 2 C c f + C c r m x ˙ 0 - x ˙ + 2 ( a C c f - b C c r m x ˙ 0 0 0 0 0 1 0 0 2 a C c f ( y ˙ + a φ ˙ ) + 2 b C c r ( b φ ˙ - y ˙ ) I z x ˙ 2 - 2 a C c f + 2 b C c r I z x ˙ 0 - 2 ( a 2 C c f + b 2 C ) c r I z x ˙ 0 0 c o s φ - s i n φ x ˙ c o s φ - y ˙ s i n φ 0 0 0 s i n φ c o s φ - x ˙ s i n φ - y ˙ c o s φ 0 0 0
B = 2 C c f m 2 C c f m 2 δ f - y ˙ + a φ ˙ x ˙ 0 2 a C c f I z 0 0
C = 0 0 1 0 0 0 0 0 0 0 1 0。
模型预测控制算法只适用于控制离散序列,采用前向欧拉法对式(11)、
式(7)进行离散化处理,离散化后状态方程如
式(8)所示:
ξ ( k + 1 ) = A ˜ ξ ˜ ( k ) + B ˜ u ˜ ( k )
(8)
式中: A ˜ = E + T A , B ˜ = T B ; ξ ˜ ( k )表示 k时刻状态量; u ˜ ( k )表示 k时刻控制量, E表示单位矩阵, T表示采样时间。
令 Ω ( k ) = ξ ( k ) u ( k - 1 ),最终可以得到预测未来 N p时刻的输出方程:
Y ( k ) = Ψ k Ω ( k ) + Θ k Δ U ( k ) + Γ k Φ ( k )
(9)
式中:
Y ( k ) = η ˜ ( k + 1 ) η ˜ ( k + 1 ) ⋮ η ˜ ( k + 1 ) , Ψ k = C ˜ A ˜ C ˜ A ˜ 2 ⋮ C ˜ A ˜ N P , Θ K = C ˜ B ˜ 0 ⋯ 0 C ˜ A ˜ B ˜ C ˜ B ˜ ⋯ 0 ⋮ ⋮ ⋮ C ˜ A ˜ N P - 1 B ˜ C ˜ A ˜ N P - 2 B ˜ ⋯ C ˜ A ˜ N P - N c B ˜ ,
Δ U ( K ) = Δ u ( k ) Δ u ( k + 1 ) ⋮ Δ u ( k + N c ) - 1 , Φ ( k ) = d ˜ ( k ) d ˜ ( k + 1 ) ⋮ d ˜ ( k + N p - 1 ) ,
Γ k = C ˜ 0 0 0 C ˜ A ˜ C ˜ 0 0 ⋮ ⋮ ⋮ ⋮ C ˜ A ˜ N P - 1 C ˜ A ˜ N P - 2 ⋯ C ˜ A ˜ 0。
3.2 目标函数设计
经典的模型预测控制(MPC)避障功能函数无法对不同类型的障碍物进行分类避障,并且在避障过程中生成的路径往往不够光滑。因此,在设计控制器时引入了人工势场法,将综合势场模型作为避让障碍物的惩罚函数,以实现对不同类型障碍物的分类处理,生成更加平滑的路径,从而提升车辆的稳定性并降低跟踪误差。APF-MPC控制器的目标函数如
式(10)所示:
m i n Δ u i ∑ i = 1 N p η ( k + i ) - η r e f ( k + i , k ) Q 2 + Δ U ( k + i , k ) R 2 + ρ ε 2 + U r e p s . t . Δ U m i n 0 ≤ Δ U ε ≤ Δ U m a x M
(10)
式中: N p为模型预测算法中的预测时域; N c控制时域; Q为输出权重矩阵; R为控制增量权重矩阵; ε表示松弛因子; ρ为松弛因子权重; M表示松弛因子上限, U r e p表示综合势场。
4 仿真验证
通过CarSim/Simulink联合仿真验证所设计的APF-MPC控制器的有效性和可行性。在参考轨迹上增设可穿越障碍物和不可穿越障碍物,以构建复杂的交通场景,并比较传统MPC控制器与改进后的APF-MPC控制器在不同速度和不同势场平滑指数下的跟踪效果。
路宽设置为4米、长设置为300米;参考轨迹设定为 Y=2;道路附着系数为 μ=0.4;在参考轨迹(60,1.85)、(120,1.85)、(160,2.25)处设置三个不穿越障碍物;在(180,1.85)、(240、1.85)处设置两个可穿越障碍物;控制器基本参数设定为: N p=15, N c=2, Q=500, R=20, T=0.02s;传统的MPC算法用控制器A表示,改进后的APF-MPC算法在势场平滑指数等于0.5、1.2、2.0时,分别用控制器B、C、D表示。
图6表示车辆从(0,0)点以出发跟踪参考轨迹,在1.72秒左右跟踪上参考轨迹。控制器A、B、C和D均能够快速跟踪参考轨迹,并成功避让不可穿越障碍物。其中,控制器B、C和D生成的跟踪轨迹相较于控制器A更加平滑,而控制器B生成的轨迹是所有控制器中最平滑,避障效果最佳,未出现传统MPC算法过度避障和避障不足的现象。
控制器A无法对障碍物进行分类处理,当车辆遇到第三个不可穿越障碍物和第一个可穿越障碍物时,均进行了完全避让,导致出现了两次连续避让现象。相比之下,控制器B、C和D在遇到第三个不可穿越障碍物和第一个可穿越障碍物时,能够成功避让不可穿越障碍物后迅速跟踪参考轨迹,并从第一个可穿越障碍物中穿过,实现了对不同类型障碍物的分类避障。
图7表示车辆的前轮转角随时间变化的曲线,控制器A前轮转角变化范围最大,车辆稳定性最低;控制器B、C的前轮转角变化平稳,车辆保持较高的稳定性;控制器D的前轮转角保持-4°~5.5°之间,对比控制器B、C稳定性有所下降。
车辆避不可穿越障碍物时前轮转角变化范围见表1:
表 1 车辆避障横摆角变化 控制器障碍物1
前轮转角/(°)
障碍物2
前轮转角/(°)
障碍物3
前轮转角/(°)
A -3.86~3.46 -4.0~4.26 -4.14~2.86 B -2.46~1.66 -1.67~2.40 -1.14~1.56 C -3.0~2.65 -2.90~3.40 -1.68~2.0 D -3.11~3.23 -3.98~6.50 -1.63~2.0图8表示车辆的横摆角度随时间变化的曲线,控制器A、B、C、D的横摆角都保持在-5~10°之间。控制器B、C、D横摆角波动幅度明显低于控制器A,横摆角变化更加平稳控制器B变化最平稳,保持较高的稳定性。
车辆避让不可穿越障碍物时横摆角变化范围见表2:
表2 控制器障碍物1
横摆角/(°)
障碍物2
横摆角/(°)
障碍物3
横摆角/(°)
A -3.76~5.50 -4.70~3.22 -4.90~2.40 B -2.30~3.05 -3.0~2.30 -2.0~1.60 C -3.4~4.50 -4.45~3.10 -2.56~1.67 D -4.5~3.60 -5.00~3.00 -2.56~1.67图9、图10分别表示车辆前轮滑移率和前轮纵向力随时间变化的曲线,车辆跟踪参考轨迹以及遇到障碍物时车辆的滑移率和前轮纵向力都在明显增加。控制器B、C、D的滑移率和纵向力变化趋势平稳、波动幅度较小,控制器B控制效果最好,控制器B、C、D控制效果明显优于控制器A。
5 结论
提出了势场平滑指数的概念,研究了不同势场平滑指数对势场模型、车辆前轮转角、横摆角、滑移率和前轮纵向力的影响,并设计了一种能够对障碍物进行分类避障的APF-MPC控制器,对其控制性能进行了分析。通过CarSim/Simulink联合仿真验证所设计的控制器的有效性和可行性。研究结果表明:所设计的APF-MPC控制器能够有效避让不同类型的障碍物,实现对不可穿越障碍物的有效避让,并能够从可穿越障碍物中通行,控制器表现出较强的鲁棒性,生成的轨迹相比传统的MPC控制器更加平滑,从而提升了车辆行驶过程中的稳定性和安全性。
{{custom_sec.title}}
=2" class="main_content_center_left_zhengwen_bao_erji_title main_content_center_left_one_title" style="font-size: 16px;">{{custom_sec.title}}{{custom_sec.content}}网址:变势场APF https://mxgxt.com/news/view/1981052
相关内容
格力空调立式品牌深度解析:技术优势与市场口碑全测评米家生态链明星智米全直流变频空调与苏宁极物小Biu空调对比
2024年“亚洲之星”包装奖 AsiaStar Awards(中国)获奖作品揭晓
市场趋势洞察:抓住市场变化,调整营销策略
明星价值大洗牌:“顶流”的诞生与覆灭
市场变了,直播电商的新趋势在哪?
贾玲职务变动!如何从这场娱乐风波中窥探运势变化与人生方向?
暖玛士:关注行业趋势和市场变化,携手合作共赢
美妆产品市场细分与消费者偏好变化趋势报告2025.docx
意甲球员转会市场变化趋势分析及未来发展预测
随便看看
最新实时动态
- 4岁被封“全球最美”,她用20年撕碎了外界的定义
- 王天辰:叔叔年纪年纪大了!怎么说自己是叔叔呢还!
- 侯明昊卢昱晓新剧台词,纪伯宰明意明心曝家庭关系
- 她们把70秒让出去,结果拿下关键席位
- 照顾好自己再奔赴山海!周深寄语:愿每个人自在追逐梦想周深线下人气
- 曹贵人的宫斗手段跟皇后华妃比差点意思,但是在九门里可真是进步了
- 《雀骨》兄长重伤五脏受损,强忍剧痛不肯示弱,只为证明王府不止世子
- 江河说出真相 洛子商原来是他儿子,报复错人了
- 严浩翔被粉丝票价吓到了,快把小严的下巴给合上别着凉了
- Rihanna则以现身价14亿美元,正式成为世界上最富有歌手
热点实时动态
- 145042
- 25600
- 20185
- 19881
- 19614
- 19577
- 19305
- 18885
- 18869
- 18834

