一种基于星对统计特征的星图匹配方法
1.本发明属于天文观测技术和空间目标天文定位领域,具体地说,涉及一 种基于星对统计特征的星图匹配方法。
背景技术:
2.星图匹配是将天文观测得到图像中的恒星像和参考星表中的恒星 进行匹配,以建立实测图像的量度坐标系和星表的天球坐标系的对应关 系。星图匹配技术是现代天文观测、空间目标天文定位、航天工程中星 敏感器卫星姿态控制等工作的基础,是确定天体测量底片模型的必要的 前置工作。随着天文观测中emccd和scmos相机的广泛的应用,对 快速且鲁棒性的星图匹配算法的需求日益凸显。
3.星图匹配技术常用的方法有基于边角特征的三角形或多边形匹配, 还有一类是基于主星伴星特征的模式识别,如格栅算法。基于边角特征 的三角形匹配方法计算复杂度高,存在冗余匹配、匹配耗时长等问题。 与经典的三角形匹配方法相比,格栅算法等模式匹配方法中由于缺星、 伪星的存在会导致主伴星模式的错误选择而影响匹配的正确率和效率。
4.在天文观测中,由于视场畸变、定心等原因造成的星象位置误差, 所采用星表和天文图像的探测星等不匹配、或宇宙线等噪声均会使得星 图匹配过程中出现大量的恒星缺失或者伪星,由于天文观测所采用的滤 光片和星表使用的不一致、以及各种噪声引起的星等误差都会降低星图 匹配的正确率。
5.因此,有必要提供一种新的基于星对统计特征的星图匹配方法。
技术实现要素:
6.有鉴于此,本发明针对基于三角形的传统和改进的星图识别方法中存在 的冗余匹配、耗时长、对位置和星等误差敏感、对缺星或者伪星敏感而造成 的匹配率低的问题,提供了一种基于星对统计特征的星图匹配方法,可用来 实现小视场天文ccd图像和星表的匹配。
7.为了解决上述技术问题,本发明公开了一种基于星对统计特征的星图匹 配方法,包括以下步骤:
8.步骤1、构造星对;
9.步骤2、从图像星对列表和星表星对列表搜寻相似的星;
10.步骤3、确定图像和星表旋转角度;
11.步骤4、初步确定匹配参数;
12.步骤5、精确确定匹配参数。
13.可选地,所述步骤1中构造星对具体为:
14.步骤1.1、将天文相机拍摄到的图片进行平场和bias改正;
15.步骤1.2、将平场和bias改正的图像进行星象检测和定心操作,利用高 斯拟合或
者矩方法的定心精度在0.1个像元及以上;按照星象灰度值从大到 小排序,选取m颗最亮的星由亮到暗构造列表i,列表记录的内容包括星象 在底片上的位置和灰度值(x,y,h);按照恒星星等从小到大排序,在星表中选 取n颗最亮的恒星构造列表r,分别记录其位置和星等信息(α,δ,m),将 选中恒星的位置信息由球面坐标转化到切平面坐标;转化方法如以下公式所 示:
[0016][0017][0018]
其中,α和δ分别为恒星的赤经和赤纬;α0和δ0为切平面中心坐标,ξ和η分 别为恒星的切平面理想坐标;利用排列组合的方法分别在图像列表和星表列 表中进行两两配对,图像列表可以构造m(m-1)/2个星对,星表列表中可以构 造n(n-1)/2个星对。
[0019]
可选地,所述步骤2中从图像星对列表和星表星对列表搜寻相似的星具 体为:
[0020]
将成像焦距记为f,相机的像元尺寸记为q,则图像亮度坐标和理想坐标 切平面坐标的距离尺度关系(ρ)表示为:
[0021][0022]
列表i中的星对距离表示为:
[0023][0024]
其中,xi和yi为图像列表所构造星对中星象i的位置测量信息,xj和yj为图像 列表所构造星对中星象j的位置测量信息;
[0025]
列表r中的星对距离表示为:
[0026][0027]
其中,(x
p
,y
p
)为星表列表所构造星对中恒星p的位置信息,(xq,yq)为星表列 表所构造星对中星象q的位置信息;
[0028]
图像构造的星对列表和星表构造的星对列表中的星对匹配的限制条件为:
[0029]
|i
ij-r
pq
|≤δf/f
ꢀꢀ
(6)
[0030][0031]
其中,δf为测量系统的焦距误差,δm为测量系统和星表系统的测光系统 星等差,m
p
和mq分别为星表星对中两个恒星的视星等,hi和hj为图像星对中 的两个星象的灰度值,按照上述匹配限制条件挑选出候选匹配星对。
[0032]
可选地,所述步骤3中确定图像和星表旋转角度具体为:
[0033]
对符合条件的星对,计算其旋转角度,旋转角度定义如图1所示,将亮 星标记为a,暗星标记为b,以亮星为中心,自北向东计算暗星相较于亮星 的方位。取值范围为0
°‑
360
°
;
[0034]
然后计算星对的相对旋转角度:
[0035][0036]
其中,(xa,ya)为亮星a的位置信息,(xb,yb)为暗星b的位置信息;
[0037]
然后计算星对的相对旋转角度:
[0038]
δθ=θ
i-θrꢀꢀ
(9)
[0039]
其中,θ
l
为图像星对的方位角,θr为星表星对的方位角,如果δθ小于0, 则将计算得到的相对旋转角度加上360
°
,以保证相对旋转角度永远置于0
ꢀ°
到360
°
之间;然后将δθ以每1
°
为区间划分为360份,统计出现在各个区 间内的旋转角个数;
[0040]
然后统计符合条件的旋转角度信息
[0041]
|δθ-mode(round(δθ))|<1
°ꢀꢀ
(10)
[0042]
其中round()为取整函数,mode()为取整后旋转角度取众数。
[0043]
符合上述条件的角度取平均,然后采用迭代的方法去除与平均值大于3 个标准差的值,迭代完成后取平均值得到相对旋转角度δθ2,此旋转角度为初 略旋转角度。
[0044]
可选地,所述步骤4中初步确定匹配参数具体为:
[0045]
量度坐标系和理想切平面坐标系之间的投影映射关系用下面的四常数公 式来确定。
[0046]
ξ=ρcosθx-ρsinθy+c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0047]
η=ρsinθx+ρcosθy+d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0048]
其中θ为两种坐标系的旋转角度,ρ为比例尺,将候选匹配星带入上式即 得到坐标中心平移量c和d;利用迭代和3倍标准差原则求得平均平移量c和d。
[0049]
可选地,所述步骤5中精确确定匹配参数具体为:
[0050]
根据步骤4得到的初始参数将所有检测到的星象转化到天球 坐标系,并寻找最近的匹配星表目标;将得到的星图星表匹配对,利用最小 二乘方法求解底片常数模型参数这一步可以执行两遍,以减少第 四步粗匹配误差带来的匹配错误风险,至此,整个匹配过程完成。
[0051]
与现有技术相比,本发明可以获得包括以下技术效果:
[0052]
相对于传统的三角匹配算法,本发明时间复杂度更低。本发明匹配算法 可分为粗匹配和精细匹配两步完成。本发明方法对星象的位置误差、虚假星 象、缺失星象以及高密度星场等情况下均可实现比较高的正确匹配率。
[0053]
当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有技 术效果。
附图说明
[0054]
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部 分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的 不当限定。在附图中:
[0055]
图1是本发明暗星较亮星方位角度定义;
[0056]
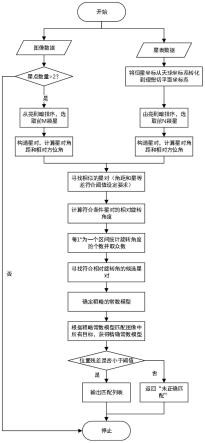
图2是本发明基于星对统计特征的星图匹配方法的流程图;
[0057]
图3是本发明拍摄目标为m35疏散星团获得的星图;
[0058]
图4是本发明将相对旋转角度利用分箱计数取众数后得到粗略的匹配旋 转角;
[0059]
图5是本发明匹配完成效果图。
具体实施方式
[0060]
以下将配合实施例来详细说明本发明的实施方式,藉此对本发明如何应 用技术手段来解决技术问题并达成技术功效的实现过程能充分理解并据以实 施。
[0061]
本发明公开了一种基于星对统计特征的星图匹配方法,包括以下步骤:
[0062]
步骤1、构造星对:
[0063]
步骤1.1、将天文相机拍摄到的图片进行平场和bias改正;
[0064]
步骤1.2、将平场和bias改正的图像进行星象检测和定心操作,利用高 斯拟合或者矩方法的定心精度一般在0.1个像元或者更高。按照从亮到暗的 顺序(星象灰度值从大到小排序),选取m颗最亮的星由亮到暗构造列表i, 列表记录的内容包括星象在底片上的位置和灰度值(x,y,h);按照从亮到暗的 顺序(恒星星等从小到大排序),星表中选取n颗恒星构造列表r,分别记 录其位置和星等信息(α,δ,m),将选中恒星的位置信息由球面坐标转化到 切平面坐标。转化方法如以下公式所示:
[0065][0066][0067]
其中,α和δ分别为恒星的赤经和赤纬;α0和δ0为切平面中心坐标,ξ和η分别 为恒星的切平面理想坐标。
[0068]
利用排列组合的方法分别在图像列表和星表列表中进行两两配对,图像 列表可以构造m(m-1)/2个星对,星表列表中可以构造n(n-1)/2个星对。
[0069]
步骤2、从图像星对列表和星表星对列表搜寻相似的星:
[0070]
将成像焦距记为f,相机的像元尺寸记为q,则图像亮度坐标和理想坐标 切平面坐标的距离尺度关系(ρ)表示为:
[0071][0072]
列表i中的星对距离表示为:
[0073][0074]
其中,xi和yi为图像列表所构造星对中星象i的位置测量信息,xj和yj为图像 列表所构造星对中星象j的位置测量信息;
[0075]
列表r中的星对距离表示为:
[0076][0077]
其中,(x
p
,y
p
)为星表列表所构造星对中恒星p的位置信息,(xq,yq)为星表列 表所构造星对中星象q的位置信息;
[0078]
图像构造的星对列表和星表构造的星对列表中的星对匹配的限制条件为:
[0079]
|i
ij-r
pq
|≤δf/f
ꢀꢀ
(6)
[0080][0081]
其中,δf为测量系统的焦距误差,δm为测量系统和星表系统的测光系统 星等差,m
p
和mq分别为星表星对中两个恒星的视星等,hi和hj为图像星对中 的两个星象的灰度值,按照上述匹配限制条件挑选出候选匹配星对。
[0082]
步骤3、确定图像和星表旋转角度:
[0083]
对符合条件的星对,计算其旋转角度,旋转角度定义如图1所示,将亮 星标记为a,暗星标记为b,以亮星为中心,自北向东计算暗星相较于亮星 的方位。取值范围为0
°‑
360
°
。
[0084]
然后计算星对的相对旋转角度:
[0085][0086]
其中,(xa,ya)为亮星a的位置信息,(xb,yb)为暗星b的位置信息。
[0087]
然后计算星对的相对旋转角度:
[0088]
δθ=θ
i-θrꢀꢀ
(9)
[0089]
其中,θi为图像星对的方位角,θr为星表星对的方位角,如果δθ小于0,则 将计算得到的相对旋转角度加上360
°
,以保证相对旋转角度永远置于0
°
到 360
°
之间。然后将δθ以每1
°
为区间划分为360份,统计出现在各个区间内 的旋转角个数。
[0090]
然后统计符合条件的旋转角度信息
[0091]
|δθ-mode(round(δθ))|<1
°ꢀꢀ
(10)
[0092]
其中,round()为取整函数,mode()为取整后旋转角度取众数。
[0093]
符合上述条件的角度取平均,然后采用迭代的方法去除与平均值大于3 个标准差的值,迭代完成后取平均值得到相对旋转角度δθ2,此旋转角度为初 略旋转角度。
[0094]
步骤4、初步确定匹配参数:
[0095]
量度坐标系和理想切平面坐标系之间的投影映射关系可以用下面的四常 数公式来确定。
[0096]
ξ=ρcosθx-ρsiθy+c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0097]
η=ρsinθx+ρcosθy+d
ꢀꢀꢀꢀ
(12)
[0098]
其中θ为两种坐标系的旋转角度,ρ为比例尺,将候选匹配星带入上式即 可以得到坐标中心平移量c和d。利用迭代和3倍标准差原则求得平均平移量c 和d。至此,坐标转换的粗略映射参数均得到了。
[0099]
步骤5、精确确定匹配参数:
[0100]
根据步骤4得到的初始参数将所有检测到的星象转化到天球 坐标系,并寻找最近的匹配星表目标;
[0101]
将得到的星图星表匹配对,利用最小二乘方法求解底片常数模型参数 这一步可以执行两遍,以减少第四步粗匹配误差带来的匹配错误 风险,至此,
整个匹配过程完成。
[0102]
实施例1
[0103]
针对天文观测和目标定位的观测需求,发明了一种基于星对旋转角特征 统计的星图匹配方法,该方法可以检测天文图像中的星象,并将检测到的星 象和星表库中的恒星星号进行对应,获得图像中星点的天文坐标(赤经、赤 纬)值,并可给出所拍摄星图的底片常数模型。
[0104]
实施例天文图像所采用的相机和望远镜参数如表1所示:
[0105]
表1望远镜和相机参数
[0106]
焦距1330cm焦比13主镜直径100cmccd视场16角分ccd像素数目4096*4112像素尺寸15μ
[0107]
在云南省昆明市利用相机对星空进行拍摄,拍摄目标为m35疏散星团, 获得的星图如图3所示,对图像进行bias和平场预处理之后,利用星象检测 方法得到符合条件的星象共计1402颗,其中最亮的两颗星象由于过曝的原因 超过了星象检测的半高全宽的阈值,定心精度有限,所以被排除掉。
[0108]
选取最亮的5颗进行匹配,根据星表和ccd视场的面积比例关系选取 适当数目的数据进行匹配。在这个实施案例中,我们采用从gaiadr2星表下 载的星等小于19等的若干个规模不同的星表进行测试,星表选择区域为圆 形,星表选取星的数目如表2所示:
[0109]
表2星表选取星的数目
[0110][0111]
用第一组来说明,符合星对距离和星等阈值要求的有4对,相对旋转角 如下表3所示。
[0112]
表3相对旋转角
[0113]
符合条件的星对相对旋转角110.1278
°
2178.1574
°
3178.1577
°
4178.1580
°
[0114]
将相对旋转角度利用分箱计数,如图4所示,取众数后得到粗略的匹配 旋转角为
178
°
。所采用的几种不同规模的星表均可正确匹配,匹配成功的 1296颗,如图5所示,圆形的为匹配成功的,三角形为未匹配成功,其未成 功匹配的原因主要是这些目标十分暗弱,视星等测量结果精度差,超过限定 的星等差阈值。
[0115]
上述说明示出并描述了发明的若干优选实施例,但如前所述,应当理解 发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可 用于各种其他组合、修改和环境,并能够在本文所述发明构想范围内,通过 上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和 变化不脱离发明的精神和范围,则都应在发明所附权利要求的保护范围内。
网址:一种基于星对统计特征的星图匹配方法 http://mxgxt.com/news/view/1206029
相关内容
一种基于星座匹配的全天自主星图识别算法基于人脸相似度匹配的明星脸装扮推荐方法
基于人脸匹配的名人励志推荐和社交网络建立方法与系统与流程
一种基于AI大数据的艺人与产品资源精准对接系统及方法与流程
基于AI大数据的艺人与产品资源精准对接系统及方法.pdf
在计算卫星坐标之前需匹配星历,以下哪种说法是正确的()。
一种基于追星族公会的大数据智能推荐系统及方法与流程
我国天气雷达和星载雷达的数据匹配及其回波强度订正方法研究
十二星座结婚配对统计表,12星座情侣夫妻统计图
基于ETC数据的用户画像生成管理方法及系统
随便看看
最新实时动态
- 何炅的“捧杀战术”:社交高手的魅力与智慧
- 从巅峰到低谷:鹿晗与关晓彤七年后的命运对比,揭示娱乐圈的残酷现状
- 娱乐圈惊天风波:马天宇删文背后隐藏的真相与李明德的绝地反击
- 虞书欣热度破3万,王一栩红包引热议
- 贵妇柏公子的神秘情缘:秦奋的反应与娱乐圈的奇葩戏码
- 王安宇与王玉雯:娱乐圈人缘这一年攀升了多少?
- 《九重紫》片酬揭秘与张庭的直播风波:娱乐圈的真实与虚幻
- 陈冠希品牌营销新策略:借力社交媒体吸引年轻消费者
- 揭开娱乐圈神秘面纱:赵露思与虞书欣的宣传对决背后真相
- 赵露思清空关注引爆热搜:顶流艺人的社交断舍离,藏着多少娱乐圈生存法则?
热点实时动态
- 12030
- 7396
- 7202
- 7041
- 7007
- 6718
- 6283
- 6105
- 6105
- 6087
