一种海上平台配电间机器人巡检系统发明专利
 专利申请类型:发明专利;
专利申请类型:发明专利;
地区:江苏-南通;
源自:南通高价值专利检索信息库;
专利名称:一种海上平台配电间机器人巡检系统
专利类型:发明专利
专利申请号:CN202410737837.8
专利申请(专利权)人:江苏蓝水海洋工程有限公司
权利人地址:江苏省南通市通州湾江海联动开发示范区海堤路北侧、东港池西侧
专利发明(设计)人:吴国华
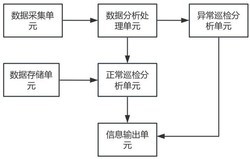
专利摘要:本发明公开了一种海上平台配电间机器人巡检系统,包括数据采集单元、数据分析处理单元、正常巡检分析单元和异常巡检分析单元,本发明涉及配电间巡检技术领域,解决了没有结合不同区域自身的特性进行合理的路线规划,巡检过程中会出现重复巡检的技术问题,本发明通过对配电间进行区域划分,接着根据不同区域内电气设备的工作状态来判断配电间整体的工作状态情况,针对不同工作状态情况采取不同的巡检方式,提高整体巡检的效率,其次结合不同区域内电气设备的实时数据和历史数据来计算其巡检值,并根据巡检值来进行合理的路径规划,同时在对路径规划的过程中针对重复巡检的情况进行二次分析和规划,从而避免因重复巡检降低整体的效率。
主权利要求:
1.一种海上平台配电间机器人巡检系统,其特征在于,包括:数据采集单元、数据分析处理单元、正常巡检分析单元、异常巡检分析单元和信息输出单元;
数据采集单元,用于对配电间的基础数据进行获取,并将配电间基础数据传输到数据分析处理单元,其中配电间基础数据包括:电气设备数量;
数据分析处理单元,用于获取到传输的配电间基础数据,并根据基础数据来对配电间的整体状态进行分析,得到状态分析结果,其中状态分析结果包括:正常工作状态和异常工作状态,同时将正常工作状态传输到正常荀娟分析单元,将异常工作状态传输到异常巡检分析单元,且数据分析处理单元生成状态分析结果的具体方式如下:S1:将配电间按照电气设备数量进行分区处理得到不同区域,且对不同区域进行标号处理记作i,且i=1、2、…、j,同时对区域i内的电气设备进行获取,并对其进行标号处理记Di,且D=1、2、…、n;
S2:接着对区域i内电气设备状态进行分析,获取到电气设备对应的电压和电流且记作IDi和UDi,并以当前时间为节点,获取时间节点之后时间周期T内区域i内电气设备D的工作状态,并对工作状态进行判断,具体方式如下:S21:获取时间周期T内单位时间电气设备D对应的电压和电流变化情况,并计算相邻两个单位时间内电气设备D电压和电流的差值记作UDci和IDci,并将其与数据存储单元预存的预设值YS进行比较;
S22:当UDci或IDci存在任一值超过预设值YS时,则将该区域i记作为预警区域,同时生成预警信号,反之当UDci和IDci均未超过预设值YS时,则将该区域i记作正常区域,同时生成正常信号;
正常巡检分析单元,用于获取到传输的正常工作状态,同时获取到数据存储单元传输的历史数据,并根据不同区域电气设备对应的实时工作状态进行巡检规划,得到对应的巡检规划信息,同时将巡检规划信息传输到信息输出单元,且正常巡检分析单元生成巡检规划信息的方式如下:P1:获取任一区域内的电气设备对其进行分析,从历史数据中获取到电气设备D对应的异常次数记作YD,且Y=1、2、…、k,同时获取到电气设备的实时工作时长记作TD,并对电气设备实时工作时长进行二次分析,且二次分析的具体方式为:P11:判断电气设备D在实时工作时长TD内是否存在调节,并根据调节情况对电气设备进行赋值记作G,其中G表示调节值,且G=a或b,a和b的具体数值由操作人员自行设定,若存在调节则电气设备D对应的调节值为Da,若不存在调节则电气设备D对应的调节值为Db;
P12:接着对电气设备D对应的异常次数YD进行分析,若异常次数YD对应的为预警情况,则将对应的异常次数赋值为c,若异常次数YD对应的为检修情况,则将对应的异常次数赋值为d,同时获取到异常次数赋值c和赋值d对应的次数分别记作W1和W2,接着根据赋值c和d计算电气设备D对应的异常值QD,且 ,其中e为自然常数,且e取值为
2.71;
P13:将电气设备D对应的调节值Db和异常值DQ代入公式进行计算
得到电气设备D对应的巡检值XD,其中 为预设比例系数,以此类
推计算得到区域内所有电气设备的巡检值,接着计算其巡检均值并将其作为区域的标准值XDp;
P2:接着以区域标准值XDp从大到小的排序顺序生成巡检路径,接着对巡检路径是否存在区域重复巡检判断,若巡检路线不存在区域重复巡检,则按照巡检路线生成对应的巡检规划信息,若巡检路线存在区域重复巡检,则对其进行二次分析,且二次分析的具体方式为:获取到巡检路线上的重复区域,并获取到其区域标准值的排序标号记作h,且h=1、
2、…、j,接着将重复区域进行剔除,将剩下的区域按照区域标准值生成巡检路线,同时将重复区域补充到巡检路线中,具体补充方式为:按照不重复巡检的原则将重复区域进行补充,且补充的时候区域巡检值不在考虑范围内,最后生成对应的巡检规划信息,并将其传输到信息输出单元;
异常巡检分析单元,用于获取到传输的异常工作状态,并根据异常工作状态对应电气设备的电压和电流生成对应的巡检规划信息,同时将巡检规划信息传输到信息输出单元,且异常巡检分析单元生成巡检规划信息的具体方式如下:A1:获取到生成的预警信号和其对应的电气设备D同时将其记作为待巡检电气设备,接着获取到待巡检电气设备对应的电流差值和电压差值,并按照从小到大进行排序,同时按照差值从小到大生成巡检路线;
A2:获取到巡检路线,并判断是否经过待巡检电气设备,若经过则将待巡检电气设备补充到巡检路线中生成新的巡检规划信息,若不经过则直接生成巡检规划信息。
2.根据权利要求1所述的一种海上平台配电间机器人巡检系统,其特征在于,所述信息输出单元,用于获取到传输的巡检规划信息,并将其通过显示电气设备显示给操作人员。 说明书 : 一种海上平台配电间机器人巡检系统技术领域[0001] 本发明涉及配电间巡检技术领域,具体为一种海上平台配电间机器人巡检系统。背景技术[0002] 配电间是电力供电网络的枢纽。为保护配电间运行状态良好,以有效地保障电力供电,配电间的电力电气设备需要经常予以巡视,以及时发现并消除配电间电气设备存在的故障隐患,保证配电间电气设备处于良好的运行状态。[0003] 根据申请号为CN202310566798.5的专利显示,该专利主控制中心、机器人部分和无人机部分;所述主控制中心设置有巡检控制模块、数据采集处理模块、异常控制模块和远程通信模块;所述机器人部分包括机器人和机器人停靠平台;所述无人机部分包括无人机和无人机停靠平台,所述机器人停靠平台和无人机停靠平台设置于海上平台的配电间内或配电间外的指定位置,所述机器人的主体上方设有中间停靠平台,若电池电量小于第一电量值,则主控制中心向无人机发送中间停靠指令,向所述无人机充电。[0004] 上述专利使机器人和无人机不仅能够根据设定程序进行各自的巡检任务,机器人还可以根据巡检遇到的异常情况,向主控制中心要求无人机进行联合检测的请求,中断无人机的巡检任务,飞至机器人位置上方,进行高处的检测动作,更全面地将检测数据发送至主控制中心,帮助主控制中心更全面和更及时地判断是否出现需要进行处理的异常,以便于向指定的单位或机构发送处理警报。不仅如此,本发明还通过在机器人上稍有中间停靠平台,供无人机在联合检测的过程中,避免因为电量不足的问题导致无人机无法工作的情况出现,更好地保证了本发明的海上平台配电间机器人巡检系统的长期稳定的运行效果。[0005] 部分现有的巡检平台在安排机器人或无人机在进行巡检的时候,没有根据不同区域的数据特性来进行合理的路线规划,其次针对生成的路线规划会存在重复巡检的情况,从而耽误整体的巡检进度。发明内容[0006] 针对现有技术的不足,本发明提供了一种海上平台配电间机器人巡检系统,解决了没有结合不同区域自身的特性进行合理的路线规划,巡检过程中会出现重复巡检的问题。[0007] 为实现以上目的,本发明通过以下技术方案予以实现:一种海上平台配电间机器人巡检系统,包括:[0008] 包括:数据采集单元、数据分析处理单元、正常巡检分析单元、异常巡检分析单元和信息输出单元。[0009] 数据采集单元,用于对配电间的基础数据进行获取,并将配电间基础数据传输到数据分析处理单元,其中配电间基础数据包括:电气设备数量。具体地,电气设备数量通过根据识别配电间的布局图获取到,且布局图可以通过无人机对配电间整体进行拍摄,且拍摄得到的图片为高清图片,系统能够对其进行识别。[0010] 数据分析处理单元,用于获取到传输的配电间基础数据,并根据基础数据来对配电间的整体状态进行分析,得到状态分析结果,其中状态分析结果包括:正常工作状态和异常工作状态,同时将正常工作状态传输到正常巡检分析单元,将异常工作状态传输到异常巡检分析单元,且得到状态分析结果的具体方式如下:[0011] S1:将配电间按照电气设备数量进行分区处理得到不同区域,且对不同区域进行标号处理记作i,且i=1、2、…、j,同时对区域i内的电气设备进行获取,并对其进行标号处理记Di,且D=1、2、…、n,此处j和n均表示为数值;[0012] S2:接着对区域i内电气设备状态进行分析,获取到电气设备对应的电压和电流且记作IDi和UDi,并以当前时间为节点,获取时间节点之后时间周期T内区域i内电气设备D的工作状态,并对工作状态进行判断,具体的判断方式如下:[0013] S21:获取时间周期T内单位时间电气设备D对应的电压和电流变化情况,并计算相邻两个单位时间内电气设备D电压和电流的差值记作UDci和IDci,并将其与数据存储单元预存的预设值YS进行比较;[0014] S22:当UDci或IDci存在任一值超过预设值YS时,则将该区域i记作为预警区域,同时生成预警信号,反之当UDci和IDci均未超过预设值YS时,则将该区域i记作正常区域,同时生成正常信号;具体的,只有满足电压和电流均符合预设值的情况,才表示对应区域电气设备工作状态正常。[0015] S3:同理S2的分析方式对所有区域进行分析,若存在预警信号,则判断配电间为异常工作状态,若不存在预警信号,则判断配电间为正常工作状态。[0016] 正常巡检分析单元,用于获取到传输的正常工作状态,同时获取到数据存储单元传输的历史数据,并根据不同区域电气设备对应的实时工作状态进行巡检规划,得到对应的巡检规划信息,同时将巡检规划信息传输到信息输出单元,且生成巡检规划信息的具体方式如下:[0017] P1:获取任一区域内的电气设备对其进行分析,从历史数据中获取到电气设备D对应的异常次数记作YD,且Y=1、2、…、k,同时获取到电气设备的实时工作时长记作TD,并对电气设备实时工作时长进行二次分析,具体的分析方式如下:[0018] P11:判断电气设备D在实时工作时长TD内是否存在调节,并根据调节情况对电气设备进行赋值记作G,其中G表示调节值,且G=a或b,a和b的具体数值由操作人员自行设定,若存在调节则电气设备D对应的调节值为Da,若不存在调节则电气设备D对应的调节值为Db;[0019] P12:接着对电气设备D对应的异常次数YD进行分析,若异常次数YD对应的为预警情况,则将对应的异常次数赋值为c,若异常次数YD对应的为检修情况,则将对应的异常次数赋值为d,同时获取到异常次数赋值c和赋值d对应的次数分别记作W1和W2,接着根据赋值c和d计算电气设备D对应的异常值QD,且 ,其中e为自然常数,且e取值为2.71;[0020] P13:将电气设备D对应的调节值Db和异常值DQ代入公式进行计算得到电气设备D对应的巡检值XD,其中 为预设比例系数,以此类推计算得到区域内所有电气设备的巡检值,接着计算其巡检均值并将其作为区域的标准值XDp;[0021] P2:接着以区域标准值XDp从大到小的排序顺序生成巡检路径,接着对巡检路径是否存在区域重复巡检判断,若巡检路线不存在区域重复巡检,则按照巡检路线生成对应的巡检规划信息,若巡检路线存在区域重复巡检,则对其进行二次分析,且二次分析的具体方式如下:[0022] 获取到巡检路线上的重复区域,并获取到其区域标准值的排序标号记作h,且h=1、2、…、j,接着将重复区域进行剔除,将剩下的区域按照区域标准值生成巡检路线,同时将重复区域补充到巡检路线中,具体补充方式为:按照不重复巡检的原则将重复区域进行补充,且补充的时候区域巡检值不在考虑范围内,最后生成对应的巡检规划信息,并将其传输到信息输出单元。[0023] 信息输出单元,用于获取到传输的巡检规划信息,并将其通过显示电气设备显示给操作人员。有益效果[0024] 本发明提供了一种海上平台配电间机器人巡检系统。与现有技术相比具备以下有益效果:[0025] 本发明通过对配电间进行区域划分,接着根据不同区域内电气设备的工作状态来判断配电间整体的工作状态情况,针对不同工作状态情况采取不同的巡检方式,提高整体巡检的效率,其次结合不同区域内电气设备的实时数据和历史数据来计算其巡检值,并根据巡检值来进行合理的路径规划,同时在对路径规划的过程中针对重复巡检的情况进行二次分析和规划,从而避免因重复巡检降低整体的效率,使用机器人巡检系统,可以实现配电房的无人值守,减少人力成本并提高安全性。附图说明[0026] 图1为本发明系统框图。具体实施方式[0027] 下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。[0028] 请参阅图1,本申请提供了一种海上平台配电间机器人巡检系统,包括:数据采集单元、数据分析处理单元、正常巡检分析单元、异常巡检分析单元和信息输出单元。[0029] 作为本发明的实施例一[0030] 数据采集单元,用于对配电间的基础数据进行获取,并将配电间基础数据传输到数据分析处理单元,其中配电间基础数据包括:电气设备数量。具体地,电气设备数量通过根据识别配电间的布局图获取到,且布局图可以通过无人机对配电间整体进行拍摄,且拍摄得到的图片为高清图片,系统能够对其进行识别。[0031] 数据分析处理单元,用于获取到传输的配电间基础数据,并根据基础数据来对配电间的整体状态进行分析,得到状态分析结果,其中状态分析结果包括:正常工作状态和异常工作状态,同时将正常工作状态传输到正常巡检分析单元,将异常工作状态传输到异常巡检分析单元,且得到状态分析结果的具体方式如下:[0032] S1:将配电间按照电气设备数量进行分区处理得到不同区域,且对不同区域进行标号处理记作i,且i=1、2、…、j,同时对区域i内的电气设备进行获取,并对其进行标号处理记Di,且D=1、2、…、n,此处j和n均表示为数值;[0033] S2:接着对区域i内电气设备状态进行分析,获取到电气设备对应的电压和电流且记作IDi和UDi,并以当前时间为节点,获取时间节点之后时间周期T内区域i内电气设备D的工作状态,并对工作状态进行判断,具体的判断方式如下:[0034] S21:获取时间周期T内单位时间电气设备D对应的电压和电流变化情况,并计算相邻两个单位时间内电气设备D电压和电流的差值记作UDci和IDci,并将其与数据存储单元预存的预设值YS进行比较;[0035] S22:当UDci或IDci存在任一值超过预设值YS时,则将该区域i记作为预警区域,同时生成预警信号,反之当UDci和IDci均未超过预设值YS时,则将该区域i记作正常区域,同时生成正常信号;具体的,只有满足电压和电流均符合预设值的情况,才表示对应区域电气设备工作状态正常。[0036] S3:同理S2的分析方式对所有区域进行分析,若存在预警信号,则判断配电间为异常工作状态,若不存在预警信号,则判断配电间为正常工作状态。[0037] 结合实际分析,此种区域划分方式为多种划分方式中的一种,具体情况根据配电间的电气设备分布情况进行区域划分,如果存在任一区域出现预警信号,则表示配电间工作状态异常,只有当所有区域均为正常信号时,则表示配电间工作状态正常。[0038] 正常巡检分析单元,用于获取到传输的正常工作状态,同时获取到数据存储单元传输的历史数据,并根据不同区域电气设备对应的实时工作状态进行巡检规划,得到对应的巡检规划信息,同时将巡检规划信息传输到信息输出单元,且生成巡检规划信息的具体方式如下:[0039] P1:获取任一区域内的电气设备对其进行分析,从历史数据中获取到电气设备D对应的异常次数记作YD,且Y=1、2、…、k,同时获取到电气设备的实时工作时长记作TD,并对电气设备实时工作时长进行二次分析,具体的分析方式如下:[0040] P11:判断电气设备D在实时工作时长TD内是否存在调节,并根据调节情况对电气设备进行赋值记作G,其中G表示调节值,且G=a或b,a和b的具体数值由操作人员自行设定,若存在调节则电气设备D对应的调节值为Da,若不存在调节则电气设备D对应的调节值为Db;[0041] P12:接着对电气设备D对应的异常次数YD进行分析,若异常次数YD对应的为预警情况,则将对应的异常次数赋值为c,若异常次数YD对应的为检修情况,则将对应的异常次数赋值为d,同时获取到异常次数赋值c和赋值d对应的次数分别记作W1和W2,接着根据赋值c和d计算电气设备D对应的异常值QD,且 ,其中e为自然常数,且e取值为2.71;[0042] P13:将电气设备D对应的调节值Db和异常值DQ代入公式进行计算得到电气设备D对应的巡检值XD,其中 为预设比例系数,以此类推计算得到区域内所有电气设备的巡检值,接着计算其巡检均值并将其作为区域的标准值XDp;[0043] P2:接着以区域标准值XDp从大到小的排序顺序生成巡检路径,接着对巡检路径是否存在区域重复巡检判断,若巡检路线不存在区域重复巡检,则按照巡检路线生成对应的巡检规划信息,若巡检路线存在区域重复巡检,则对其进行二次分析,且二次分析的具体方式如下:[0044] 获取到巡检路线上的重复区域,并获取到其区域标准值的排序标号记作h,且h=1、2、…、j,接着将重复区域进行剔除,将剩下的区域按照区域标准值生成巡检路线,同时将重复区域补充到巡检路线中,具体补充方式为:按照不重复巡检的原则将重复区域进行补充,且补充的时候区域巡检值不在考虑范围内,最后生成对应的巡检规划信息,并将其传输到信息输出单元。[0045] 结合实际分析,一开始按照巡检值生成的巡检路线为区域1、5、3、4、2和6的顺序,在此巡检路线中,比如存在重复的区域有区域2和区域6,因此在二次分析的时候首先生成1、5、3和4的巡检路线,再将区域2和区域6补充进去,则得到的巡检路线信息为1、5、6、3、2和4,这样一来得到的巡检路线信息避开了重复巡检。[0046] 信息输出单元,用于获取到传输的巡检规划信息,并将其通过显示电气设备显示给操作人员。[0047] 作为本发明的实施例二,本实施例在实施例一的基础上实施例,且与实施例一的区别之处在于,本实施例是通过异常巡检分析单元对异常工作状态下进行巡检路线生成,且具体的生成方式为:[0048] A1:获取到生成的预警信号和其对应的电气设备D同时将其记作为待巡检电气设备,接着获取到待巡检电气设备对应的电流差值和电压差值,并按照从小到大进行排序,同时按照差值从小到大生成巡检路线;[0049] A2:获取到巡检路线,并判断是否经过待巡检电气设备,若经过则将待巡检电气设备补充到巡检路线中生成新的巡检规划信息,若不经过则直接生成巡检规划信息。[0050] 信息输出单元,用于获取到传输的巡检规划信息,并将其通过显示电气设备显示给操作人员。[0051] 作为本发明的实施例三,重点在于将实施例一和实施例二的实施过程结合实施。[0052] 同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。[0053] 以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。
专利地区:江苏
专利申请日期:2024-06-07
专利公开日期:2024-08-27
专利公告号:CN118315957B
以上信息来自国家知识产权局,如信息有误请联系我方更正!
该专利所有权非本平台所有,我方无法提供专利权所有者联系方式,请勿联系我方。
网址:一种海上平台配电间机器人巡检系统发明专利 http://mxgxt.com/news/view/1128600
相关内容
一种地铁站机器人巡检系统及巡检方法发明专利无人机自主巡检电网
科达自控(831832)取得2项发明专利证书 进一步提升在综采工作面智能化控制系统及矿山特种机器人领域的竞争力
王小利 山东大学主页平台管理系统
专利检索
E物业云平台、物业通管理系统、西安亘和软件、物业收费软件、物业客服巡检系统
考普瑞西元器件取得一种阀门全自动检测线专利
2018世界机器人大会来哪些“大明星”?
智能机器人平台,智能机器人平台培训
海润天恒取得一种岗位画像生成方法及系统专利
随便看看
最新实时动态
- 秦岚赵丽颖迪丽热巴孙俪刘涛李冰冰刘亦菲袁泉
- 刘亦菲个人资料大全 刘亦菲后援会 粉丝团
- 刘亦菲发宣传照被吐槽,粉丝:你真的该换摄影师和化妆师了
- 各位刘亦菲们是什么梗
- 刘亦菲小组
- 刘亦菲遭粉丝推倒惹人心疼 微博晒萌照似可爱猫咪
- 刘亦菲现身洛杉矶和粉丝合影 「一动作」网友吃惊:她竟然敢
- 刘亦菲杨幂粉丝开战?热搜男星是夜店咖?坤音四子退圈闭关?
- 明星社区病毒泛滥 刘亦菲等论坛均遭黑手
- 《欢乐颂》江苏开播 刘涛、蒋欣、王子文、杨紫、乔欣“五美”齐出场
热点实时动态
- 11790
- 7363
- 7174
- 7012
- 6980
- 6689
- 6254
- 6076
- 6076
- 6055

